[VIP第1年] 指数:3
[VIP第1年] 指数:3
谐波减速器轴承作为交叉滚子轴承的**应用领域,该词关联机器人、工业自动化设备的关键传动部件需求。机器人轴承聚焦于工业机器人关节、机械臂等高精度运动场景,体现现代智能制造的**需求。十字滚子轴承强调轴承内部滚子交叉排列的结构特征,是技术文档中的常用术语
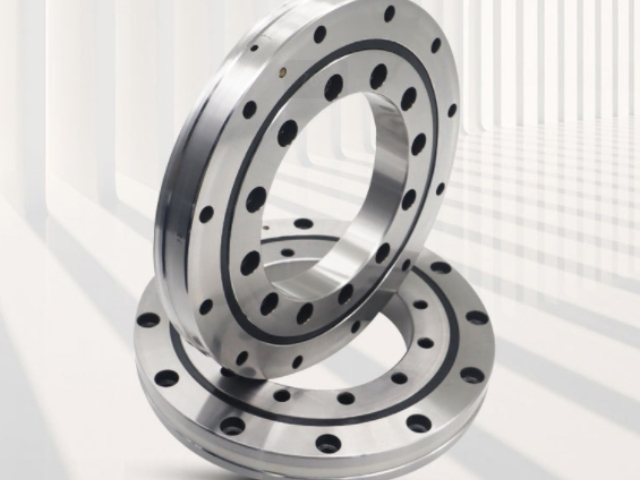
CSF系列外圈分体式设计,适配中小力矩机器人关节,搜索热度与谐波减速器选型需求强相关
SHF系列内外圈整体结构,主打高刚性、稳定旋转精度,常见于高速机器人及精密设备领域 交叉圆柱滚子轴承已被快易优收录,另外,不会发生滚子的一方接触现象或者锁死现象。机械臂的肘部交叉滚子轴承代号
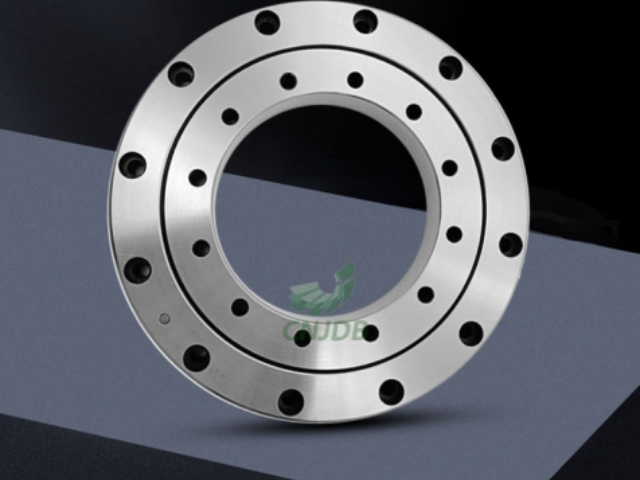
交叉滚子轴承的滚子在内轮与外轮间,间隔交叉地彼此成直角方式排列。它们能同时承受来自各方向荷重 ( 如轴向、推力或动量荷重等 ) 。因滚子与轨道表面成线状接触,因此,轴承受荷重而弹性变形之可能性很小。此型轴承***运用在如工业自动机械人、工作机械及医疗设施等,需要刚性高、紧密及高转速下仍能确保精确之场合下。
在交叉滚子轴承中,因圆柱滚子在上通过间隔保持器被相互垂直地排列,所以 1 个交叉滚子轴承就可承受径向负荷、轴向负荷及力矩负荷等所有方向的负荷。内外圈的尺寸被**小限度地小型化,特别极薄型式是接近于极限的小型尺寸,并且具有高刚性,所以**适合于工业用机器人的关节部或旋转部、机械加工中心的旋转工作台、机械手旋转部、精密旋转工作台、医疗机器、计量器、 IC 制造装置等的用途。 数控机床交叉滚子轴承源头厂家滚子之间装有间隔保持器或者隔离块,可以防止滚子的倾斜所滚子之间相互磨察。
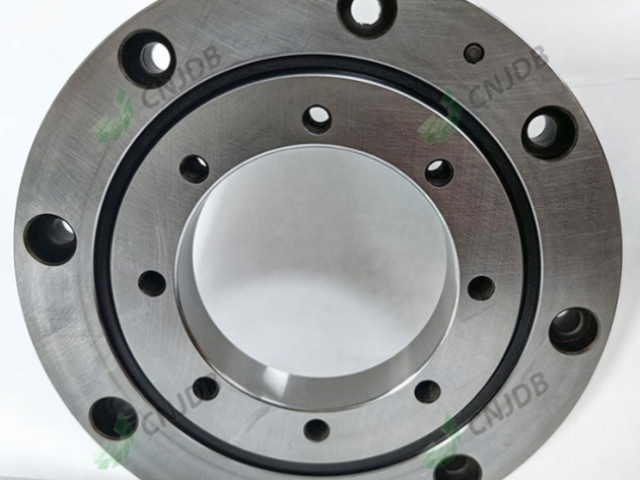
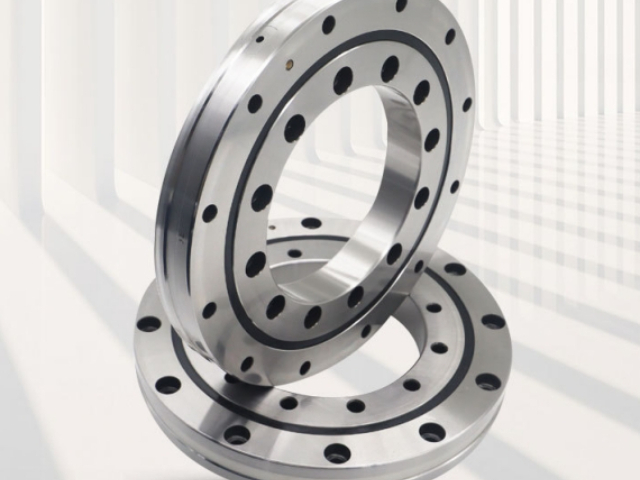
谐波减速器轴承是一种专业为谐波减速器配套的精密十字交叉滚子轴承。谐波减速器轴承主要有两个类型组成:根据其使用场合分为外圈分体、内圈整体的CSF/CSG系列谐波减速器轴承与外圈和内圈均为整体的BSHF/BSHG系列谐波减速器轴承这两大类。滚动体为圆柱滚子,分布于互成90°垂直排列在V型滚道中。这种结构使得单个轴承就可以同时承受轴向载荷、径向载荷和倾覆力矩等各个方向的载荷,谐波减速器配套轴承具有很高的刚度、旋转精度以及复合承载能力;其外形紧凑,自带有安装孔,便于直接安装,适合于各种不同类型的谐波减速器。
近年来,中国工业机器人产业进入新的历史机遇期,以ABB、KUKA、安川、发那科为**的国际机器人企业纷纷大举进入中国,设立工厂,抢占市场份额。在中国,如手机制造、半导体、液晶生产机械等行业,对小型机器人的需求也是越来越旺盛,然而对于国内的工业机器人而言,特别是谐波减速器、伺服电机、控制系统等还需大量依赖进口,这就导致了其竞争力还与国外企业有差距,但是这些又是工业机器人的上游部件、关键部件。据国际机器人联盟(IFR)统计,2012年中国共进口工业机器人约2.2万台,中国将是全球增长**快的工业机器人市场。HDSI的谐波减速器是小型工业机器人(20kg以下)或者关节臂上不可取代的部件,这为其拓展中国大陆市场带来了新的契机。2011年1月,HDSI在华成立设立哈默纳科(上海)商贸有限公司,该公司为其在华投资设立的全资销售子公司。主要负责HDSI产品在中国大陆的销售、选型等技术支持及售后服务。热处理影响套圈中渗碳均匀性,可以提高交叉滚子轴承的耐磨性硬度,是影响交叉滚子轴承可靠性寿命的环节。

轴承一般分滑动和滚动两大类,其中滚动轴承应用场景更为较广。就目前来看,全球轴承市场基本被八大国际厂商垄断,主要原因还是它们起步早,发展历史悠久。相较之下,我国轴承还有很大的国产替代空间。未来,受益于人形机器人加速放量,深海科技、低空经济市场规模进一步拓宽,国内的轴承行业还将迎来一波强势增长。
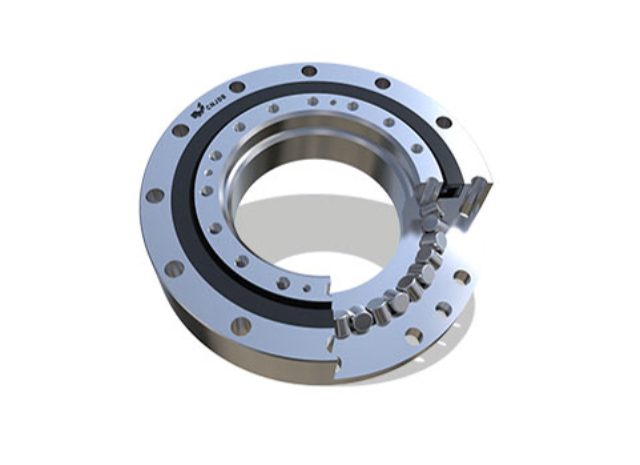
谐波传动轴承:采用应变波齿轮传动原理,具有柔性金属杯(波发生器)、刚性圆形花键和带齿柔性花键。这种轴承可在紧凑轻巧的封装中实现高齿轮减速比,适合空间有限的机器人应用,其零间隙操作可确保精确定位和重复性。 润滑系统降低摩擦,延长使用寿命;保持架防止滚子碰撞;密封结构防止灰尘进入.机械臂的肘部交叉滚子轴承源头厂家
交叉滚子轴承能同时承受来自各方向荷重(如轴向、推力或动量荷重等)。机械臂的肘部交叉滚子轴承代号
交叉滚子轴承是一种内圈分割、外圈旋转 的特殊型号轴承。因被分割的内环或外环,在装入滚柱和间隔保持器后,与交叉滚柱轴环固定在一起,以防止互相分离,故安装交叉滚柱轴环时操作简单。由于滚柱为交叉排列,因此只用1套交叉滚柱轴环就可承受各个方向的负荷,与传统型号相比,刚性提高3~4倍。同时,因交叉滚子轴承内圈或外圈是两分割的构造,轴承间隙可调整,即使被施加预载,也能获得高精度地旋转运动。而且,由于其特殊的结构,在工业机器人中通常用作关节轴承。机械臂的肘部交叉滚子轴承代号
文章来源地址: http://jxjxysb.shopjgsb.chanpin818.com/zhoucheng/gdzc/deta_28216252.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。